Biography
Jefferson Pardomuan is a Human-Computer Interaction (HCI) researcher.
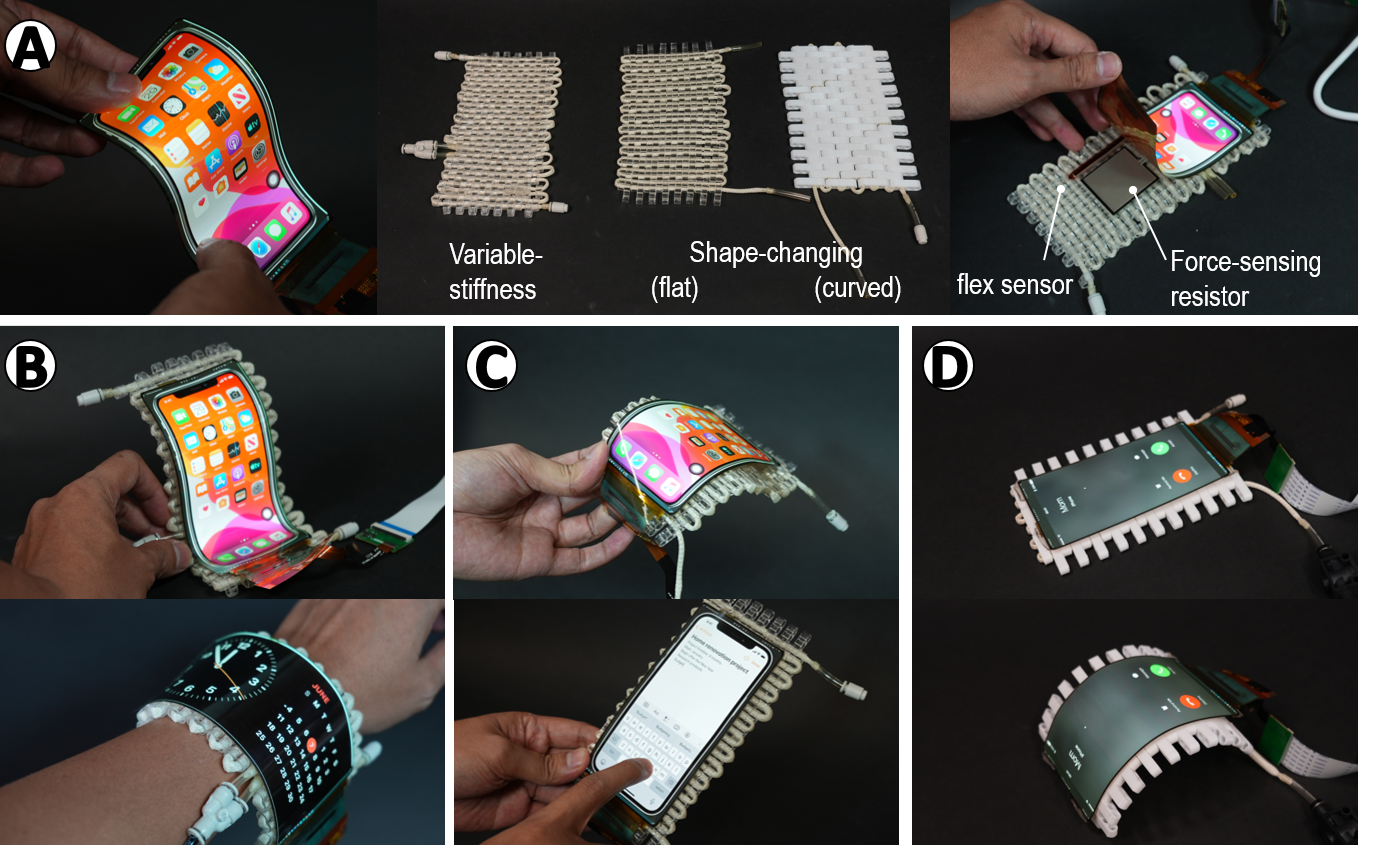
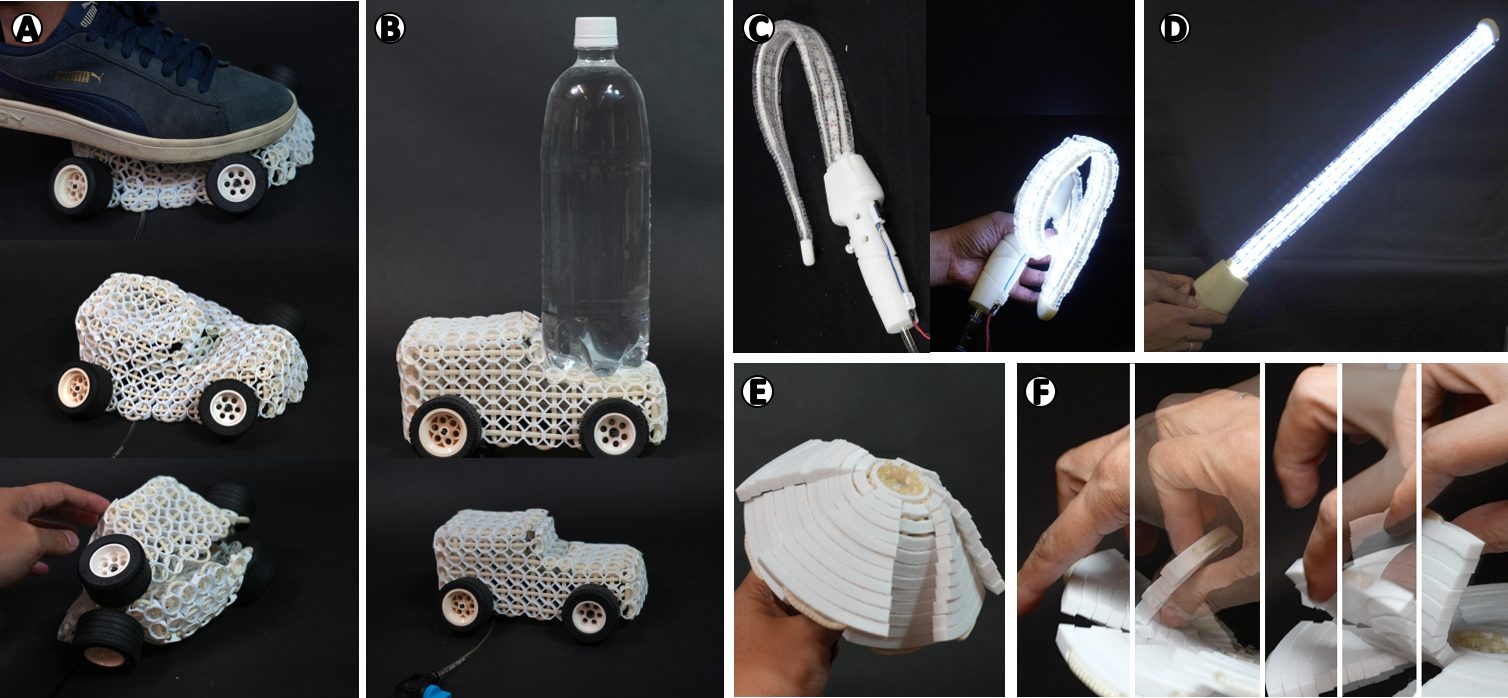
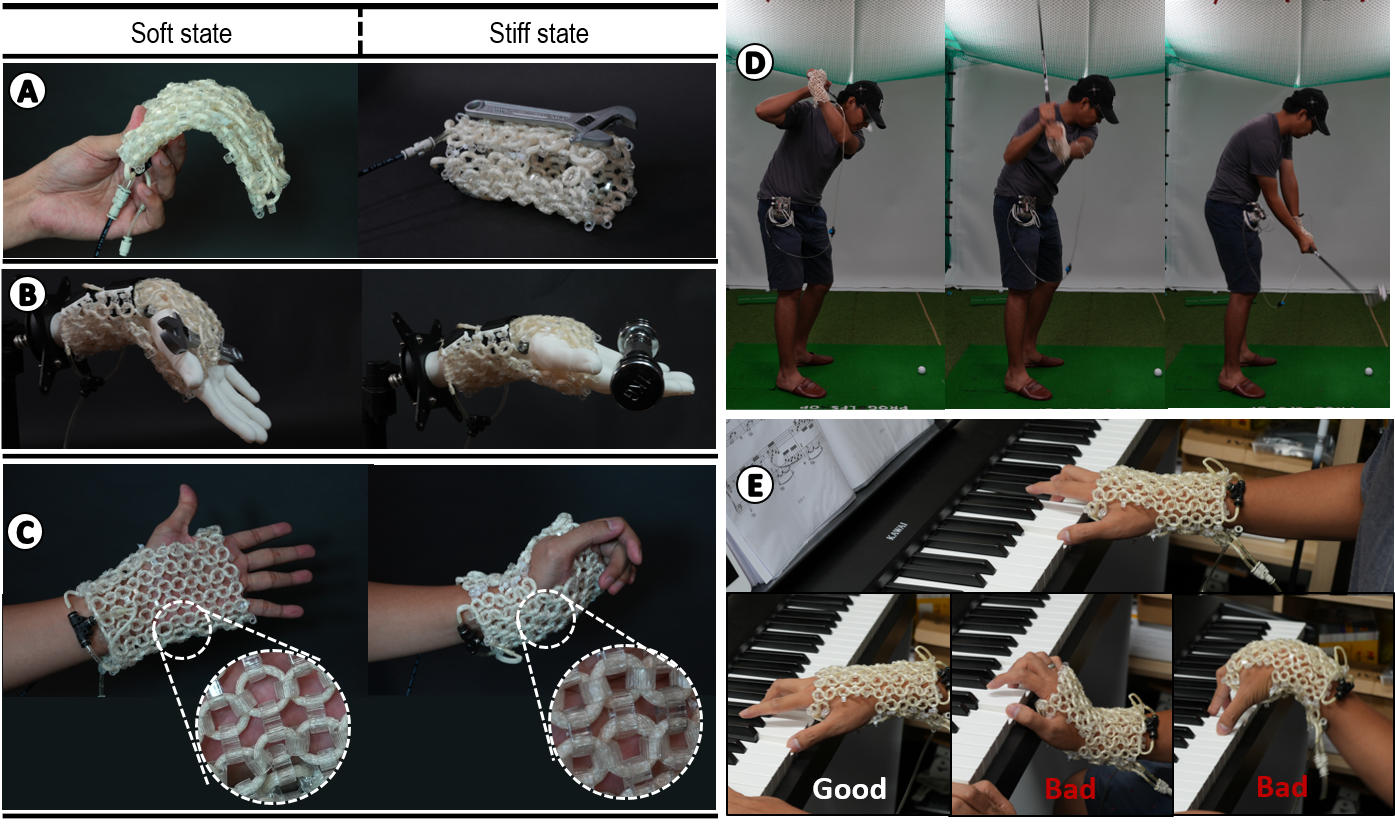
His research focuses on developing novel actuation techniques using pneumatic artificial muscles to achieve variable stiffness in materials. This allows him to explore the practical applications of variable-stiffness robots and fabrics in diverse forms, including clothing, furniture, toys, and VR controllers. His work has been published in peer-reviewed conferences and journals spanning the fields of Human-Computer Interaction (HCI) and robotics, such as CHI, UIST, IEEE Access, and IEEE CG&A.
- Shape-changing Interface
- Tangible User Interface
- Soft robotics
- Variable-stiffness
PhD in Computer Science, 2023
Tokyo Institute of Technology
MEng in Information System, 2014
University of Electro-communication Tokyo
BEng (Hons) in Electronic System, 2012
Polytechnic University Japan
Projects

Experience
Gallery